18. Adjusting Lidar Parameters
Header Text
Adjusting Lidar Parameters
ND313 C1 L1 A17 Lidar Paramaters [LB]
Lidar Parameters
You can orbit and move around the scene to see the different rays that are being cast. The current lidar settings will limit what you can do, however. The resolution is low, and as you can see from the scene, only one of the rays is touching a car. So The next task for you will be to increase your lidar's resolution so you can clearly see the other cars around. To do this, follow the instructions from the TODO statements in lidar.h.
The changes include increasing the minimum distance so you don't include contact points from the roof of your car, increasing both the horizontal and vertical angle resolution, and finally, adding noise. The noise you will be adding is actually quite high since units are meters, but it will yield more interesting and realistic point data in the scene. Also feel completely free to experiment and play around with these lidar hyper parameters!
Exercise
-
Now you will increase lidar resolution by increasing the number of vertical layers and the angular resolution around the z-axis.
-
numLayersshould change from 3 to 8. -
horizontalLayerIncrementshould change from pi/6 to pi/64.
-
-
Set
minDistanceto 5 (meters) to remove points from your vehicle's roof. - Add noise, around 0.2 to get a more interesting pcd.
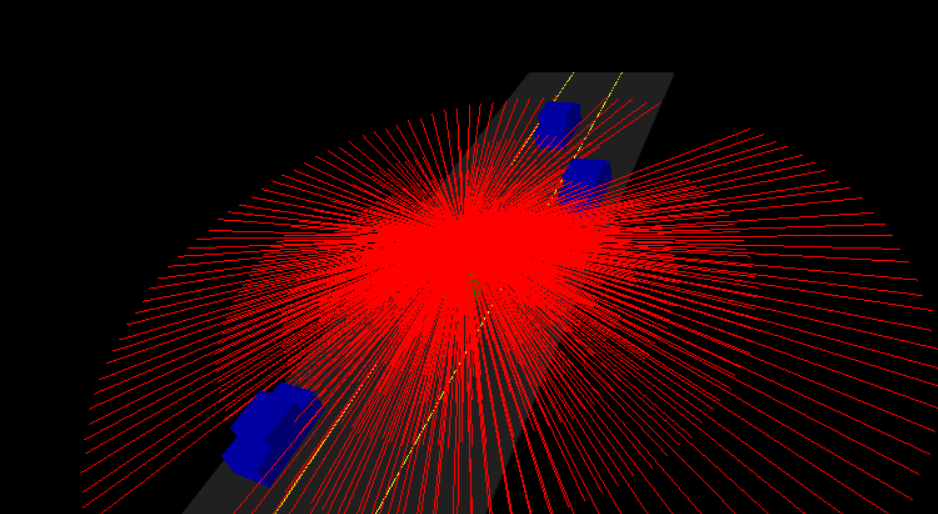
When you are finished with the exercise, your output should look like the image below.
Lidar with Adjusted Parameters
Increasing Lidar Range
Workspace
This section contains either a workspace (it can be a Jupyter Notebook workspace or an online code editor work space, etc.) and it cannot be automatically downloaded to be generated here. Please access the classroom with your account and manually download the workspace to your local machine. Note that for some courses, Udacity upload the workspace files onto https://github.com/udacity , so you may be able to download them there.
Workspace Information:
- Default file path:
- Workspace type: react
- Opened files (when workspace is loaded): n/a
Solution
ND313 C1 L1 A18 Update Lidar Parameters Solution